

Una IA inspirada en insectos podría hacer que los sistemas de defensa antimisiles sean más ágiles
por Frances Chance

En cada uno de nuestros cerebros, 86 mil millones de neuronas trabajan en paralelo, procesando las entradas de los sentidos y la memoria para producir las muchas hazañas de la cognición humana. Los cerebros de otras criaturas son menos capaces, pero esos animales a menudo exhiben aptitudes innatas para tareas particulares, habilidades perfeccionadas por millones de años de evolución.
La mayoría de nosotros hemos visto animales haciendo cosas inteligentes. Quizás su mascota doméstica sea un artista del escape. Tal vez vivas cerca de la ruta de migración de aves o mariposas y celebras su regreso anual. O tal vez te has maravillado de la aparente determinación con la que las hormigas invaden tu despensa.
Considerar sistemas nerviosos tan especializados como modelo para la inteligencia artificial puede resultar tan valioso, si no más, que estudiar el cerebro humano. Considere los cerebros de esas hormigas en su despensa. Cada uno tiene unas 250.000 neuronas. Los insectos más grandes tienen cerca de 1 millón. En mi investigación en Sandia National Laboratories en Albuquerque, estudio el cerebro de uno de estos insectos más grandes, la libélula. Mis colegas y yo de Sandia, un laboratorio de seguridad nacional, esperamos aprovechar las especializaciones de estos insectos para diseñar sistemas informáticos optimizados para tareas como interceptar un misil entrante o seguir una columna de olor. Aprovechando la velocidad, simplicidad y eficiencia del sistema nervioso de la libélula,
Considerar a una libélula como un presagio de los futuros sistemas informáticos puede parecer contradictorio. Los desarrollos en inteligencia artificial y aprendizaje automático que generan noticias suelen ser algoritmos que imitan la inteligencia humana o incluso superan las capacidades de las personas. Las redes neuronales ya pueden funcionar tan bien, si no mejor, que las personas en algunas tareas específicas, como la detección de cáncer en exploraciones médicas. Y el potencial de estas redes neuronales se extiende mucho más allá del procesamiento visual. El programa informático AlphaZero , entrenado por auto-juego, es el mejor jugador de Go del mundo. Su hermana AI, AlphaStar , se encuentra entre los mejores jugadores de Starcraft II .
Sin embargo, tales hazañas tienen un costo. El desarrollo de estos sistemas sofisticados requiere cantidades masivas de potencia de procesamiento, generalmente disponible solo para instituciones seleccionadas con las supercomputadoras más rápidas y los recursos para respaldarlas. Y el costo de la energía es desagradable. Estimaciones recientes sugieren que las emisiones de carbono resultantes del desarrollo y entrenamiento de un algoritmo de procesamiento del lenguaje natural son mayores que las producidas por cuatro automóviles durante su vida útil.
A la libélula le toma solo unos 50 milisegundos comenzar a responder a la maniobra de una presa. Si asumimos 10 ms para que las células del ojo detecten y transmitan información sobre la presa, y otros 5 ms para que los músculos comiencen a producir fuerza, esto deja solo 35 ms para que el circuito neural haga sus cálculos. Dado que normalmente una sola neurona necesita al menos 10 ms para integrar las entradas, la red neuronal subyacente puede tener al menos tres capas de profundidad.
Pero, ¿una red neuronal artificial realmente necesita ser grande y compleja para ser útil? Creo que no es así. Para cosechar los beneficios de las computadoras inspiradas en los nervios a corto plazo, debemos lograr un equilibrio entre la simplicidad y la sofisticación.
Lo que me lleva de vuelta a la libélula, un animal con un cerebro que puede proporcionar precisamente el equilibrio adecuado para determinadas aplicaciones.
Si alguna vez te has encontrado con una libélula, ya sabes lo rápido que pueden hacer zoom estas hermosas criaturas y has visto su increíble agilidad en el aire. Quizás menos obvio a partir de la observación casual es su excelente capacidad de caza: las libélulas capturan con éxito hasta el 95 por ciento de las presas que persiguen, comiendo cientos de mosquitos en un día.
La destreza física de la libélula ciertamente no ha pasado desapercibida. Durante décadas, las agencias estadounidenses han experimentado con el uso de diseños inspirados en libélulas para drones de vigilancia. Ahora es el momento de centrar nuestra atención en el cerebro que controla esta diminuta máquina de caza.
Si bien es posible que las libélulas no puedan jugar juegos estratégicos como Go, una libélula demuestra una forma de estrategia en la forma en que apunta por delante de la ubicación actual de su presa para interceptar su cena. Esto requiere cálculos realizados extremadamente rápido; por lo general, una libélula tarda solo 50 milisegundos en comenzar a girar en respuesta a la maniobra de una presa. Lo hace mientras rastrea el ángulo entre su cabeza y su cuerpo, de modo que sepa qué alas batir más rápido para girar delante de la presa. Y también rastrea sus propios movimientos, porque a medida que la libélula gira, la presa también parecerá moverse.
La libélula modelo se reorienta en respuesta al giro de la presa. El círculo negro más pequeño es la cabeza de la libélula, sostenida en su posición inicial. La línea negra continua indica la dirección del vuelo de la libélula; las líneas de puntos azules son el plano del ojo de la libélula modelo. La estrella roja es la posición de la presa en relación con la libélula, con la línea roja punteada que indica la línea de visión de la libélula.
De modo que el cerebro de la libélula está realizando una hazaña notable, dado que el tiempo necesario para que una sola neurona sume todas sus entradas, llamada constante de tiempo de membrana, supera los 10 milisegundos. Si se toma en cuenta el tiempo para que el ojo procese la información visual y para que los músculos produzcan la fuerza necesaria para moverse, en realidad solo hay tiempo para tres, tal vez cuatro, capas de neuronas, en secuencia, para sumar sus entradas y transmitir información.
¿Podría construir una red neuronal que funcione como el sistema de interceptación de libélulas? También me pregunté sobre los usos de un sistema de interceptación inspirado en los nervios. Estando en Sandia, consideré inmediatamente las aplicaciones de defensa, como la defensa antimisiles, imaginando misiles del futuro con sistemas a bordo diseñados para calcular rápidamente las trayectorias de interceptación sin afectar el peso o el consumo de energía de un misil. Pero también hay aplicaciones civiles.
Por ejemplo, los algoritmos que controlan los vehículos autónomos podrían hacerse más eficientes, ya que ya no requieren un baúl lleno de equipos informáticos. Si un sistema inspirado en una libélula puede realizar los cálculos para trazar una trayectoria de intercepción, tal vez los drones autónomos podrían usarlo para evitar colisiones. Y si se pudiera hacer una computadora del mismo tamaño que el cerebro de una libélula (alrededor de 6 milímetros cúbicos), tal vez el repelente de insectos y las mosquiteras algún día se conviertan en cosa del pasado, ¡reemplazados por diminutos drones que matan insectos!
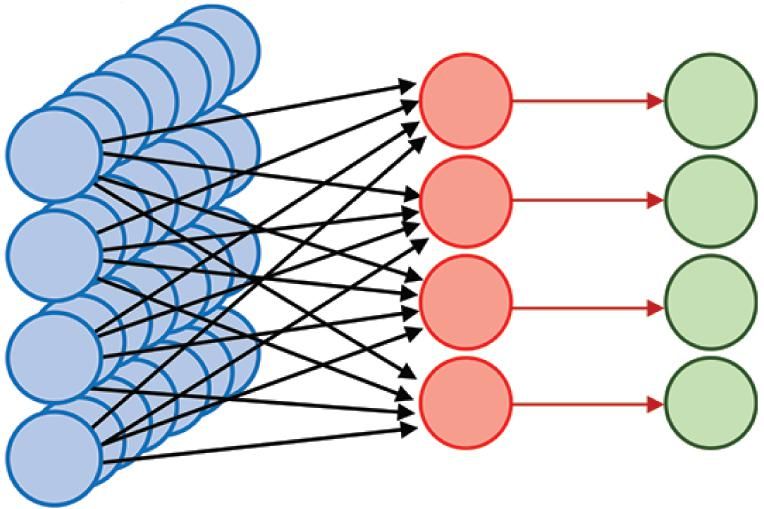
Para comenzar a responder estas preguntas, creé una red neuronal simple para reemplazar el sistema nervioso de la libélula y la usé para calcular los giros que hace una libélula para capturar presas. Mi red neuronal de tres capas existe como una simulación de software. Inicialmente, trabajé en Matlab simplemente porque ese era el entorno de codificación que ya estaba usando. Desde entonces he portado el modelo a Python.
Debido a que las libélulas tienen que ver a su presa para capturarla, comencé simulando una versión simplificada de los ojos de la libélula, capturando el mínimo detalle requerido para rastrear presas. Aunque las libélulas tienen dos ojos, generalmente se acepta que no utilizan la percepción de profundidad estereoscópica para estimar la distancia a su presa. En mi modelo, no modelé ambos ojos. Tampoco intenté igualar la resolución de un ojo de libélula. . En cambio, la primera capa de la red neuronal incluye 441 neuronas que representan la entrada de los ojos, cada una de las cuales describe una región específica del campo visual; estas regiones están en mosaico para formar una matriz de 21 por 21 neuronas que cubre el campo de la libélula. vista. Cuando la libélula gira, la ubicación de la imagen de la presa en el campo de visión de la libélula cambia. La libélula calcula los giros necesarios para alinear la imagen de la presa con una (o unas pocas, si la presa es lo suficientemente grande) de estas neuronas “oculares”. Un segundo conjunto de 441 neuronas, también en la primera capa de la red, le dice a la libélula qué neuronas oculares deben alinearse con la imagen de la presa, es decir, dónde debe estar la presa dentro de su campo de visión.
La libélula modelo ataca a su presa.
El procesamiento (los cálculos que toman datos que describen el movimiento de un objeto a través del campo de visión y lo convierten en instrucciones sobre en qué dirección debe girar la libélula) ocurre entre la primera y la tercera capa de mi red neuronal artificial. En esta segunda capa, utilicé una matriz de 194,481 (21 4) neuronas, probablemente mucho más grandes que la cantidad de neuronas que utiliza una libélula para esta tarea. Calculé previamente los pesos de las conexiones entre todas las neuronas en la red. Si bien estos pesos se pueden aprender con suficiente tiempo, existe una ventaja en “aprender” a través de la evolución y arquitecturas de redes neuronales preprogramadas. Una vez que sale de su etapa de ninfa como un adulto alado (técnicamente conocido como teneral), la libélula no tiene un padre que la alimente o le muestre cómo cazar. La libélula se encuentra en un estado vulnerable y se está acostumbrando a un nuevo cuerpo; sería una desventaja tener que idear una estrategia de caza al mismo tiempo. Configuré los pesos de la red para permitir que el modelo de libélula calcule los giros correctos para interceptar a su presa de la información visual entrante. ¿Qué turnos son esos? Bien, si una libélula quiere atrapar un mosquito que se cruza en su camino, no puede simplemente apuntar al mosquito. Tomando prestado de lo que dijo una vez el jugador de hockey Wayne Gretsky sobre los discos, la libélula tiene que apuntar hacia donde va a estar el mosquito. Podría pensar que seguir el consejo de Gretsky requeriría un algoritmo complejo, pero de hecho la estrategia es bastante simple: todo lo que la libélula necesita hacer es mantener un ángulo constante entre su línea de visión con su almuerzo y una dirección de referencia fija.
Los lectores que tengan alguna experiencia en el pilotaje de embarcaciones comprenderán por qué. Saben que deben preocuparse cuando el ángulo entre la línea de visión de otro barco y una dirección de referencia (por ejemplo, hacia el norte) permanece constante, porque están en curso de colisión. Los marineros han evitado durante mucho tiempo seguir ese rumbo, conocido como navegación paralela, para evitar colisiones.

Estos tres mapas de calor muestran los patrones de actividad de las neuronas en el mismo momento; el primer conjunto representa el ojo, el segundo representa las neuronas que especifican qué neuronas oculares alinear con la imagen de la presa y el tercero representa las que emiten comandos motores.
Traducido a las libélulas, que quieren chocar con su presa, la receta es simple: mantenga constante la línea de visión de su presa en relación con alguna referencia externa. Sin embargo, esta tarea no es necesariamente trivial para una libélula, ya que se abalanza y gira para recolectar su comida. La libélula no tiene un giroscopio interno (que sepamos) que mantendrá una orientación constante y proporcionará una referencia independientemente de cómo gire la libélula. Tampoco tiene una brújula magnética que siempre apuntará al norte. En mi simulación simplificada de la caza de libélulas, la libélula gira para alinear la imagen de la presa con una ubicación específica en su ojo, pero necesita calcular cuál debería ser esa ubicación.
La tercera y última capa de mi red neuronal simulada es la capa de comando del motor. Las salidas de las neuronas en esta capa son instrucciones de alto nivel para los músculos de la libélula, que le dicen a la libélula en qué dirección girar. La libélula también usa la salida de esta capa para predecir el efecto de sus propias maniobras sobre la ubicación de la imagen de la presa en su campo de visión y actualiza la ubicación proyectada en consecuencia. Esta actualización permite a la libélula mantener estable la línea de visión de su presa, en relación con el mundo externo, a medida que se acerca.
Es posible que las libélulas biológicas hayan desarrollado herramientas adicionales para ayudar con los cálculos necesarios para esta predicción. Por ejemplo, las libélulas tienen sensores especializados que miden las rotaciones del cuerpo durante el vuelo, así como las rotaciones de la cabeza en relación con el cuerpo; si estos sensores son lo suficientemente rápidos, la libélula podría calcular el efecto de sus movimientos en la imagen de la presa directamente desde las salidas del sensor o utilizando un método para verificar el otro. No consideré esta posibilidad en mi simulación.
Para probar esta red neuronal de tres capas, simulé una libélula y su presa, moviéndose a la misma velocidad a través del espacio tridimensional. Mientras lo hacen, mi cerebro modelado de red neuronal “ve” a la presa, calcula dónde apuntar para mantener la imagen de la presa en un ángulo constante y envía las instrucciones apropiadas a los músculos. Pude demostrar que este modelo simple del cerebro de una libélula puede interceptar con éxito otros insectos, incluso presas que viajan a lo largo de trayectorias curvas o semi-aleatorias. La libélula simulada no alcanza la tasa de éxito de la libélula biológica, pero tampoco tiene todas las ventajas (por ejemplo, una velocidad de vuelo impresionante) por las que se conocen las libélulas.
Se necesita más trabajo para determinar si esta red neuronal realmente está incorporando todos los secretos del cerebro de la libélula. Investigadores del Campus de Investigación Janelia del Instituto Médico Howard Hughes, en Virginia, han desarrollado pequeñas mochilas para libélulas que pueden medir señales eléctricas del sistema nervioso de una libélula mientras está en vuelo y transmitir estos datos para su análisis. Las mochilas son lo suficientemente pequeñas como para no distraer a la libélula de la caza. Del mismo modo, los neurocientíficos también pueden registrar señales de neuronas individuales en el cerebro de la libélula mientras el insecto se mantiene inmóvil pero se le hace pensar que se está moviendo presentándole las señales visuales adecuadas, creando una realidad virtual a escala de libélula.
Los datos de estos sistemas permiten a los neurocientíficos validar los modelos de cerebro de libélula comparando su actividad con los patrones de actividad de las neuronas biológicas en una libélula activa. Si bien todavía no podemos medir directamente las conexiones individuales entre las neuronas en el cerebro de la libélula, mis colaboradores y yo podremos inferir si el sistema nervioso de la libélula está haciendo cálculos similares a los predichos por mi red neuronal artificial. Eso ayudará a determinar si las conexiones en el cerebro de la libélula se parecen a mis pesos precalculados en la red neuronal. Inevitablemente encontraremos formas en las que nuestro modelo difiere del cerebro real de libélula. Quizás estas diferencias proporcionen pistas sobre los atajos que toma el cerebro de la libélula para acelerar sus cálculos.

Esta mochila que captura señales de electrodos insertados en el cerebro de una libélula fue creada por Anthony Leonardo, líder de grupo en el Campus de Investigación Janelia.ANTHONY LEONARDO / CAMPUS DE INVESTIGACIÓN JANELIA / HHMI
Las libélulas también podrían enseñarnos cómo implementar la “atención” en una computadora. Es probable que sepa lo que se siente cuando su cerebro está en plena atención, completamente en la zona, concentrado en una tarea hasta el punto en que otras distracciones parecen desvanecerse. Una libélula también puede enfocar su atención. Su sistema nervioso aumenta el volumen de las respuestas a objetivos particulares, presumiblemente seleccionados, incluso cuando otras presas potenciales son visibles en el mismo campo de visión. Tiene sentido que una vez que una libélula ha decidido perseguir una presa en particular, debería cambiar de objetivo solo si no ha logrado capturar su primera opción. (En otras palabras, usar la navegación paralela para atrapar una comida no es útil si se distrae con facilidad).
Incluso si terminamos descubriendo que los mecanismos de la libélula para dirigir la atención son menos sofisticados que los que usan las personas para concentrarse en medio de una cafetería abarrotada, es posible que un mecanismo más simple pero de menor potencia resulte ventajoso para los algoritmos de próxima generación y sistemas informáticos al ofrecer formas eficientes de descartar entradas irrelevantes
Las ventajas de estudiar el cerebro de la libélula no terminan con nuevos algoritmos; también pueden afectar el diseño de los sistemas. Los ojos de las libélulas son rápidos, funcionan al equivalente a 200 fotogramas por segundo: eso es varias veces la velocidad de la visión humana. Pero su resolución espacial es relativamente pobre, quizás solo una centésima parte de la del ojo humano. Comprender cómo la libélula caza con tanta eficacia, a pesar de sus limitadas capacidades de detección, puede sugerir formas de diseñar sistemas más eficientes. Usando el problema de la defensa antimisiles, el ejemplo de la libélula sugiere que nuestros sistemas antimisiles con detección óptica rápida podrían requerir menos resolución espacial para alcanzar un objetivo.
La libélula no es el único insecto que podría influir en el diseño de computadoras de inspiración neuronal en la actualidad. Las mariposas monarca migran distancias increíblemente largas, utilizando un instinto innato para comenzar sus viajes en la época apropiada del año y dirigirse en la dirección correcta. Sabemos que las monarcas dependen de la posición del sol, pero navegar por el sol requiere hacer un seguimiento de la hora del día. Si eres una mariposa que se dirige al sur, querrás tener el sol a tu izquierda por la mañana pero a tu derecha por la tarde. Entonces, para establecer su curso, el cerebro de la mariposa debe leer su propio ritmo circadiano y combinar esa información con lo que está observando.
Otros insectos, como la hormiga del desierto del Sahara, deben buscar alimento en distancias relativamente largas. Una vez que se encuentra una fuente de sustento, esta hormiga no simplemente vuelve sobre sus pasos de regreso al nido, probablemente un camino tortuoso. En su lugar, calcula una ruta directa de regreso. Debido a que la ubicación de la fuente de alimento de una hormiga cambia de un día a otro, debe ser capaz de recordar el camino que tomó en su viaje de búsqueda de alimento, combinando información visual con alguna medida interna de la distancia recorrida, y luego calcular su ruta de regreso a partir de esos recuerdos.
Si bien nadie sabe qué circuitos neuronales en la hormiga del desierto realizan esta tarea, los investigadores del Campus de Investigación de Janelia han identificado circuitos neuronales que permiten que la mosca de la fruta se autooriente utilizando puntos de referencia visuales . La hormiga del desierto y la mariposa monarca probablemente utilizan mecanismos similares. Estos circuitos neuronales algún día podrían resultar útiles en, digamos, drones de baja potencia.
¿Y si la eficiencia de la computación inspirada en insectos es tal que millones de instancias de estos componentes especializados se pueden ejecutar en paralelo para soportar un procesamiento de datos o aprendizaje automático más poderoso? ¿Podría el próximo AlphaZero incorporar millones de arquitecturas de búsqueda de hormigas para refinar su juego? Quizás los insectos inspirarán una nueva generación de computadoras que se vean muy diferentes a las que tenemos hoy. Se podría usar un pequeño ejército de algoritmos similares a la intercepción de libélulas para controlar las piezas en movimiento de un parque de atracciones, asegurando que los autos individuales no chocan (como los pilotos que conducen sus botes) incluso en medio de un baile complicado pero emocionante.
Nadie sabe cómo será la próxima generación de computadoras, si serán compañeros en parte cyborg o recursos centralizados como el Multivac de Isaac Asimov. Asimismo, nadie puede decir cuál será el mejor camino para desarrollar estas plataformas. Si bien los investigadores desarrollaron las primeras redes neuronales inspirándose en el cerebro humano, las redes neuronales artificiales de hoy en día a menudo se basan en cálculos decididamente no cerebrales. Estudiar los cálculos de neuronas individuales en circuitos neuronales biológicos —actualmente solo es posible directamente en sistemas no humanos— puede tener más que enseñarnos. Los insectos, aparentemente simples pero a menudo asombrosos en lo que pueden hacer, tienen mucho que contribuir al desarrollo de las computadoras de próxima generación.
Así que la próxima vez que veas un insecto haciendo algo inteligente, imagina el impacto en tu vida diaria si pudieras tener la brillante eficiencia de un pequeño ejército de diminutos cerebros de libélulas, mariposas o hormigas a tu disposición. Tal vez las computadoras del futuro le den un nuevo significado al término “mente en colmena”, con enjambres de procesadores minúsculos altamente especializados pero extremadamente eficientes, capaces de ser reconfigurados y desplegados dependiendo de la tarea en cuestión. Con los avances que se están realizando en la neurociencia en la actualidad, esta aparente fantasía puede estar más cerca de la realidad de lo que cree.
Fuente: https://spectrum.ieee.org/fast-efficient-neural-networks-copy-dragonfly-brains